

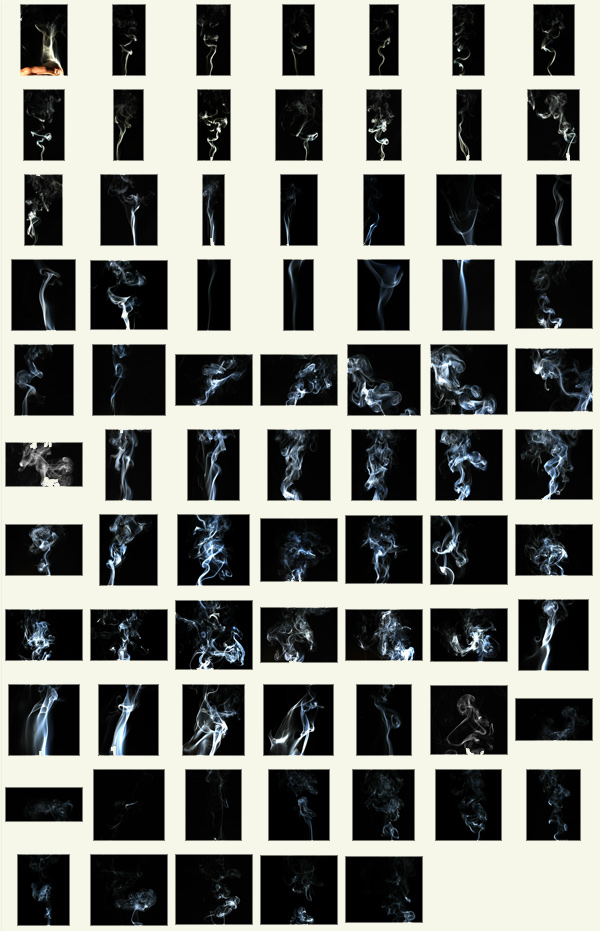
This smoke pack has 75 high resolution images of smoke on a solid black background. Add a gradient layer over the smoke and change the layers blending mode in Photoshop for a nice touch. You can also rotate and invert the layer to get a mystic look. All the images are around 2000 x 3000 pixels.
Previews:






THANK U, you have a great site. Greetings from Australia!
really thanks!
LUV YA AWESOME KICKK BUTT SITE! DO U HAVE AN ADDRESS TO SEND A ($ DONATION) FOR YA FREE DOWNLOADS? PS: IF I COULD HAVE TAKEN ANOTHER CLASS IN COLLEGE DEF WOULD HAVE BEEN COMPUTER SOFTWARE DESIGNIN (LOL) BY THE WAY… I DESIGNED A KEWL IMAGE W/YA SKULL #CK MY BLOG PAGE IF U HAVE TIME…. CAN U RECOMMEND BOOKS OR SITE ON HOW TO WORK W/PHOTOSHOP….. I HAVE AN OLD VERISON OF ADOBE. WANNA ADD SOME KEWL STUFF TO IT…TKS
Thanks! Use the contact link and email us and we can chat via skype anytime.
great!!thanks so much for sharing!!:)
really it is very good job for designers
They all look beautiful
Thanks for sharing …amazing
Thanks for sharing this ur great
You guys are True American Heroes.
awesome
Thank you!!!
It’s great!!!
amazing! thank you!!!
Fantastic!
Awsome! I’ve been playing with brushes trying to get this look. Perfect Thanks heaps 🙂
These are so great! Thanks!
It is very useful thank a lot for u these fantastic images
Thank you, these are really nice!
Outstanding work. Thanks for giving for giving so much to the art comunity.
Thank you very much (:
AWESOME! THANKS FOR SHARING YOUR CREATIVITY!
nice, i like
from Indonesia 🙂
Absolutely topnotch – thanks very much
AWSOME BOSSSS……………..
excellent, thank you for your time
wonderful! really thanks:)
This is cool as fuck 🙂
Beautiful! Thank you so much.
very cool … Thanxxx!
Thank you!!!
Your welcome!
very good stocks thax man
Enjoy!
Great work, thanks!
Thanks so much!!! You’re awesome
love these smoke effects they’re little bit hard 2 create however you’ve simplify that process 4 us. Thank you so much.
You guys are amazing! I love all your free packs, you guys keep expanding my mind!!
hey.. Love all the images.. Cant imagine how hard they were shooting them.
thing is, I’ve been dying to download them for a current project but it keeps bucking up.
How else can i get it?
Thanks……foe smoke
Now i can make smoke effects in my photos…..
be creative great thnx!
Thank you soo much for this images. I like you soo much for this :D!
you are AWESOME!!!
hi. i just wana say thanks for all you have done and share with us. thank you man.
well done and i have best wishes for you.
I came here looking for away to add moving smoke to a static photo…while looking at your stuff, I realized I can shoot some smoke in the dark and use the animation timeline in photoshop to combine my bizarre still with real smoke…
Great Jobs…and Fresh Idea
In one word….awesome!
HI. I’m reasonably new to photoshop (still learning) and anything else computer. I’m currently making my own web site to do with our photography and In doing so became Interested in other things I can do with photoshop. I would like to thank you for helping me with ideas and of course for your awesome images you share.
THANK YOU! These smoke images are exactly what I needed and are just gorgeous. Seriously…thank you!!!
Thanks man!!!! Always Wanted these………..
nice
THANKS
gracias por todo los aportes, son de mucha utilidad… graciass
Smokingly hot! These are what I need to create the smoke effects I’ve been wanting to do. Love, love, love it!!!
Smoke!My love!
It can create secret atmosphere!
Nice brush set. thanks to the authore
Hi, loved the site, can i contribute in images and graphics?
let me know!
nice work
Magnifique!
Thank you very much for the smoke. I’m a school teacher.
Hie, I tried to download this file but it suddenly stop downloading please fix this
How to use this in photoshop…? do you have any tutorial..? Please Help Devloper
love it all … good site …
thanks
These are great! I just started doing some work for this medical marijuana shop. These will definitely come in handy! Can’t believe your giving these away. Much appreciated. Thanks for sharing. Anything you need that I can help out with, please reach out! Thanks again.
Glad you could use them Chris! We’re just trying to do our part to puff, puff, pass….